Evaluation phase
in Poland
This example demonstrates the results, which were obtained, based on the previously shown excerpt from the preparation and execution phase of the first DRIVER+ trial in Poland. Accordingly, only evaluation values for the selected gap and the solution in the trial are presented.
Neither the team working in the baseline nor the one in the innovation line pointed all the locations and colours of the coloured sheets completely correctly on the map. In addition, the teams in the innovation line placed some of them in wrong locations. The results are presented in the tables blow. The results show the rate of identified sheets in relation to the real number of the sheets on site (“ground truth”).
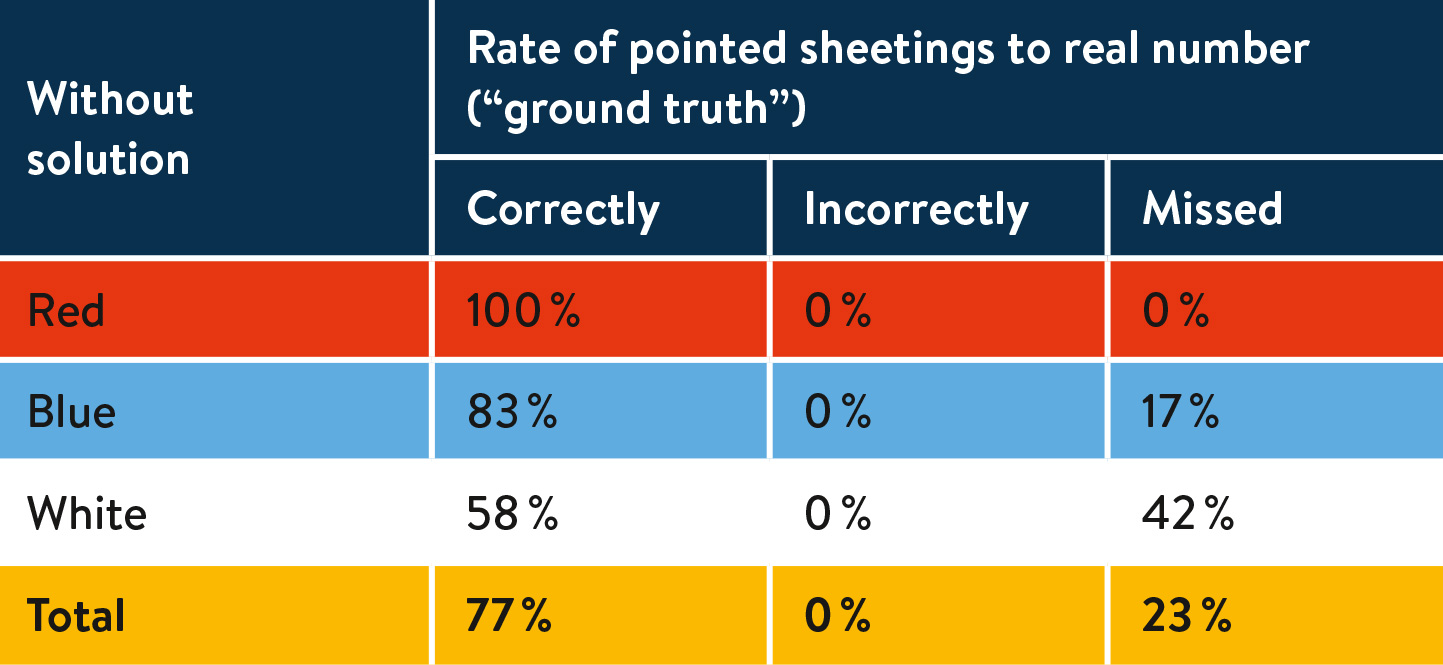
Time needed on average: 39 minutes
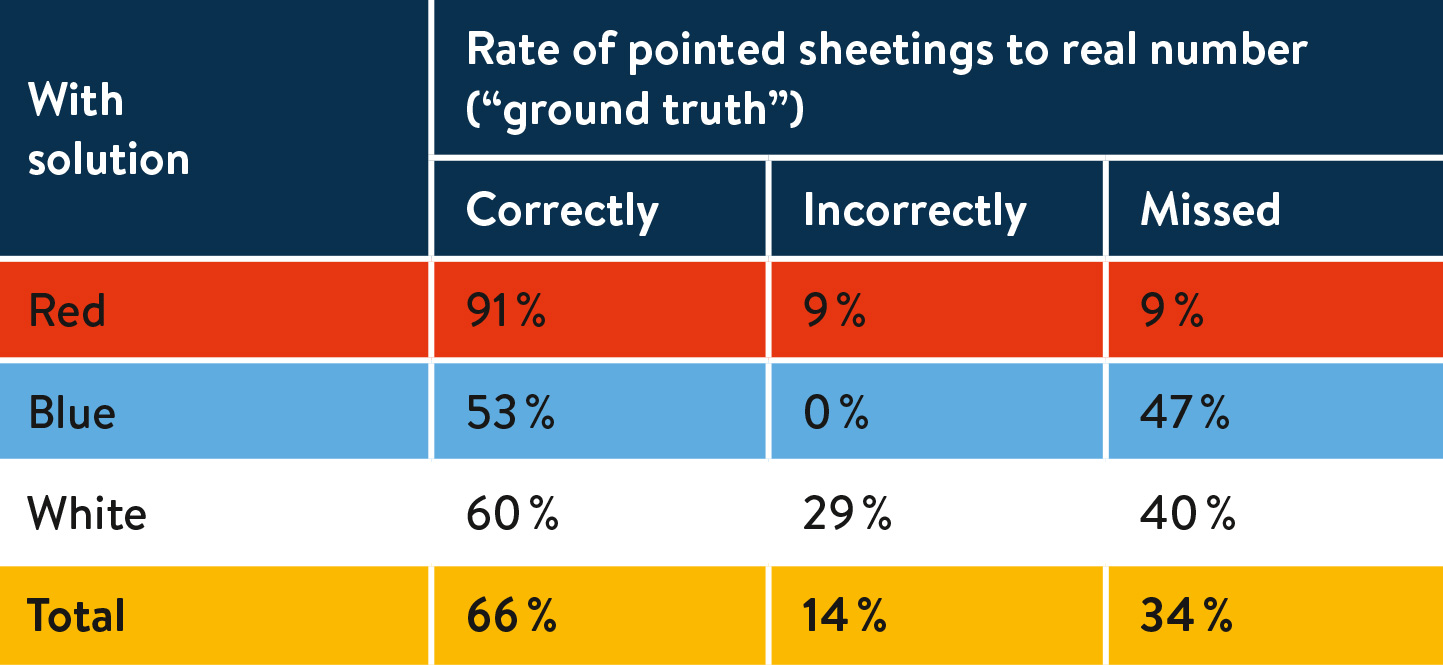
Time needed on average: 30 minutes
The values show that overall the precision of identifying the coloured sheets in the field was lower in the Innovation Line using the solution. In addition, additional incorrect sightings were recorded, which was not the case in the baseline. In order to compare the times to prepare the decision after receiving the data, it is necessary to add the time for collecting the data. The drone flight is used in both baseline and innovation line and takes 13 minutes. The processing time needed to create the orthophoto map and 3D model in the innovation line using the solution was 82 min. Concluding, one can see that also the time needed to draw a decision did not achieve better values than the baseline.
To answer the research question, the following statements have been concluded as a summary from the results presented above:
- Managing the resources of units from different countries requires a detailed identification of needs and tasks to be carried out. The innovation line can support this assessment by providing information in the form of a 3D model and orthophoto map of an area of limited accessibility. Identification of the needs of the population may enable the needs of the affected population to provide adequate assistance to be better assessed. The solution can partly support cross-border resource management during multi-stakeholder long-term rescue operations by providing 3D maps of the affected area. The biggest constraint in this case is the time to provide outputs, especially in case of low data transfer at the area.
- The drone rapid mapping solution provides data, which might be shown in COP tools as well, providing latest imaginary of affected area in form of orthophoto map.
