Hindamisfaas
Poolas
See näide demonstreerib tulemusi, mis saadi Poolas toimunud DRIVER+ Trial-õppuse varem kirjeldatud ettevalmistus- ja elluviimisfaaside tulemusena. Seetõttu on esitatud ka üksnes valitud probleemkoha ja lahenduse hindamise väärtused.
Lähte- ja innovatsiooniolukorra meeskonnad ei suutnud kumbki osutada kaardil päris õigesti kõigile värviliste linade asukohtadele ja värvidele. Lisaks asetasid innovatsiooniolukorra meeskonnad mõned neist valedesse kohtadesse. Tulemused on esitatud alltoodud tabelites. Tulemused näitavad tuvastatud linade määra võrrelduna linade tegeliku arvuga toimumiskohas („põhitõde“).
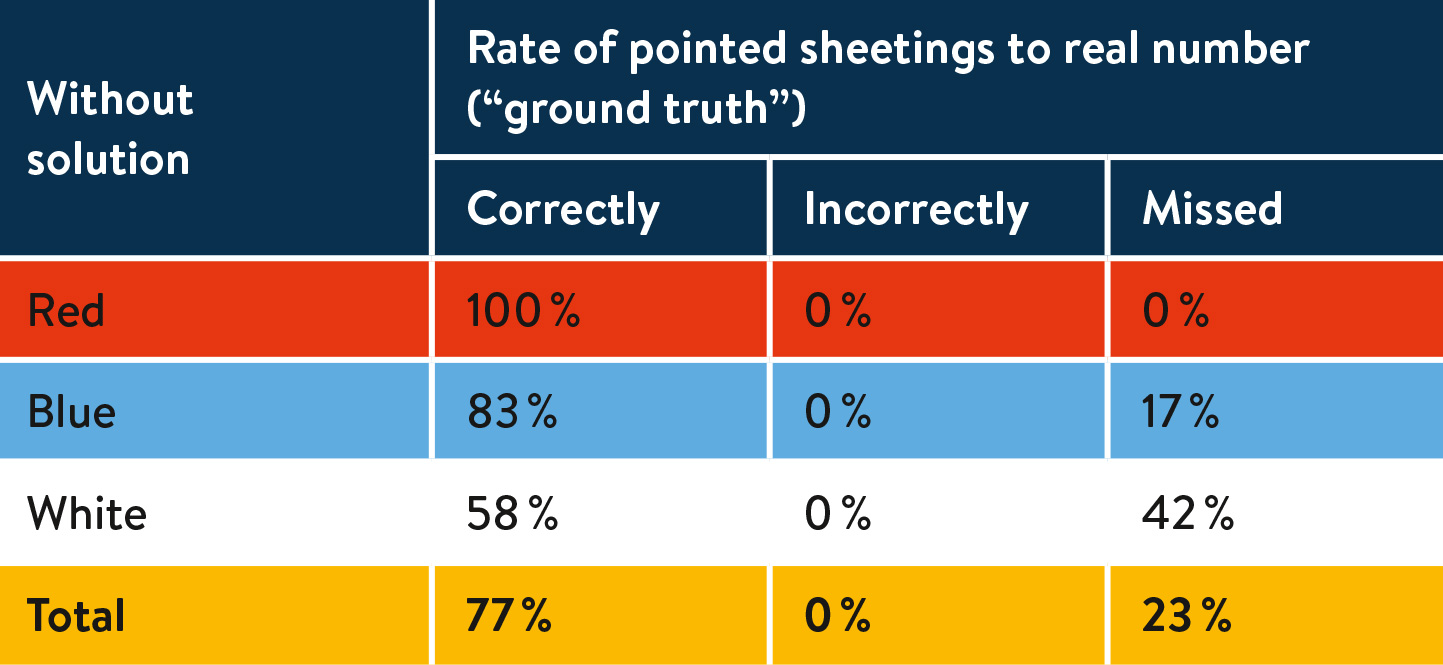
Keskmiselt kulunud aeg: 39 minutit.
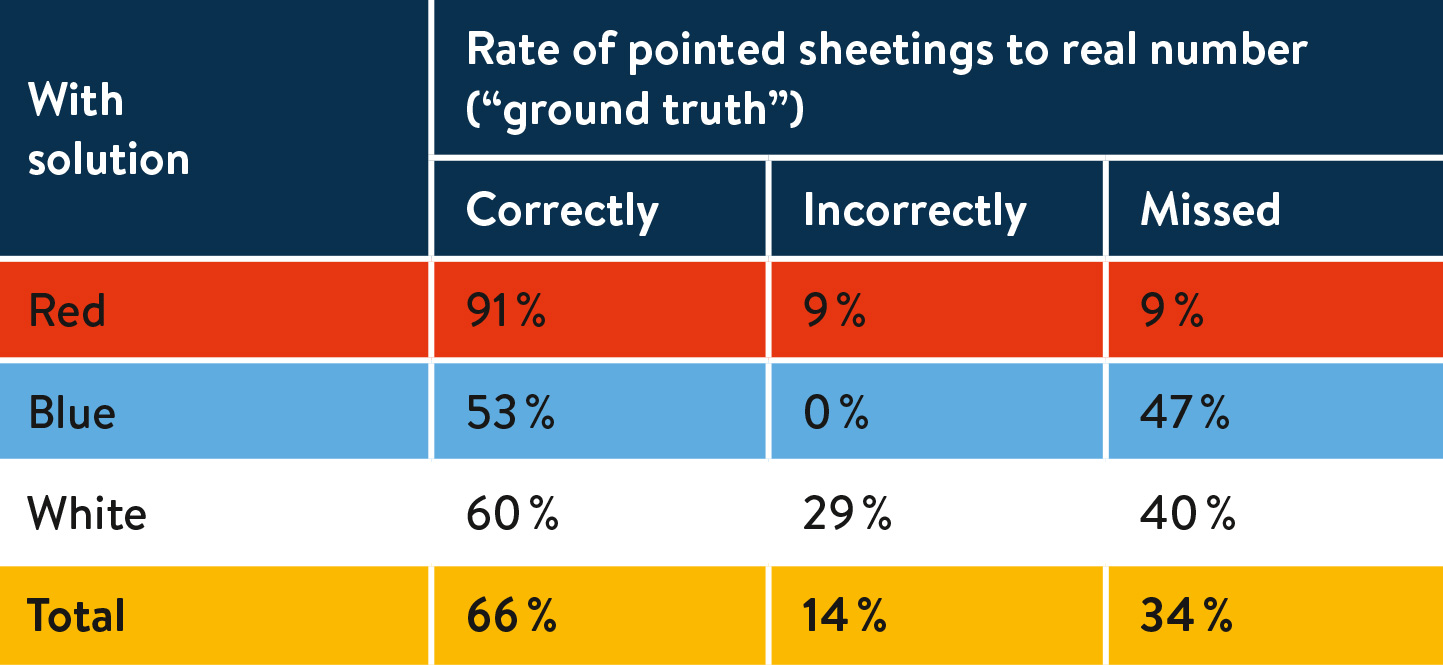
Keskmiselt kulunud aeg: 30 minutit.
Väärtused näitavad, et üldiselt oli tegevuskoha värviliste linade tuvastamise täpsus madalam innivatsiooniolukorras lahendust kasutades. Lisaks kirjendati mitmeid vääri linade asukohti, mida lähteolukorra puhul ei esinenud. Et võrrelda otsuse ettevalmistamiseks kuluvat aega pärast andmete saamist, on vaja lisada andmete kogumiseks kuluv aeg. Nii lähteolukorra kui ka innovatsiooniolukorra puhul kasutatakse drooni ja selle lennuks kulub 13 minutit. Ortofotokaardi ja innovatsiooniolukorra 3D mudeli loomiseks lahenduse abil kulus 82 minutit. Kokkuvõttes on näha, et otsuse langetamiseks kuluv aeg lähteolukorraga võrreldes ei paranenud.
Uurimisküsimusele vastamiseks koostati järgmised seisukohad, mis võtavad kokku ülaltoodud tulemused:
- Eri riikidest pärinevate üksuste ressursside juhtimine nõuab enne teostamist täpset vajaduste ja ülesannete tuvastamist. Innovatsiooniolukord võib seda hinnangut toetada, andes 3D mudeli ja ortofotokaardi abil teavet piiratud ligipääsetavusega piirkonna kohta. Elanikkonna vajaduste tuvastamine võimaldab paremini hinnata vajaminevat abi. Lahendus võib osaliselt toetada piiriüleste ressursside juhtimist mitme huvigrupiga pikaajaliste päästeoperatsioonide käigus, luues kriisipiirkonnast 3D kaardi. Kõige suurem piirang antud juhul oli väljundi saamiseks kuluv aeg, eriti kui piirkonnas on kehv andmesideühendus.
- Drooni kiirkaardistuslahendus annab andmeid, mida võiks vaadata ka COP tööriistadega, saades värskeima pildi mõjutatud piirkonnast ortofotokaardi kujul.
